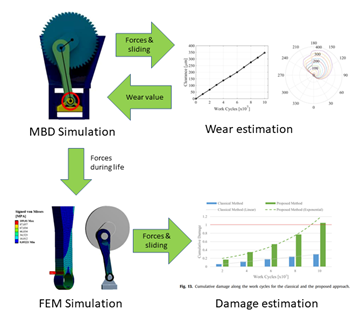
MBD simulation is a novel methodology for studying the impact of clearance increase in the structural life or fatigue assessment on robotics through Multi-Body Dynamic analysis. A simplified method based on popular commercial software is proposed to analyze the effect of clearance evolution on the service life of robots, which requires low effort from the user, thus being a suitable tool industry. This simulation method has been developed to be able to estimate the degradation of the joints (wear) depending on the operational use (loads) and estimate the non-linear evolution of the degradation mode. In this way, it is possible to evaluate how the performance of a system (precision or fatigue) can vary during its use phase and estimate the service life of a mechanism. The solution is a physical model-based library element running in MATLAB and is capable to run embedded into a multibody simulation.
This solution could be particularly interesting for users who want to evaluate the performance of robotic or manipulator solutions in terms of precision and fatigue, as there is no other commercial alternative at present. Among many other possible use cases, this solution could be useful in the development of mobile robotic assistants for industrial operations such as screwing and assembly.
In order to implement the MBD simulation, it is necessary for the interested parties to have a MATLAB environment (and hardware powerful enough to run it), although standalone executable models can also be provided. To facilitate implementation, support is provided in the development of the physics-based model and evaluation.
For more information, please contact: