Introduction
This building block is about a control principle and technology objects to improve the ergonomics and operational efficiency of manual cranes.
Problem
A wide variety of cranes are used in the industry, ranging from motorized cranes which are usually utilized for large loads and large operational distances, to completely manual/passive cranes for smaller loads and relatively shorter distances. The latter only supports the payload in vertical directions, and operators still have to manually transfer the payload in the horizontal direction. As the operator pushes or pulls the payload in the desired direction of motion, tension is created on the cable/chain where the payload is hanging, which in turn moves the moving part of the crane (i.e. overhead bridge and/or hoist with the trolley) in the same direction. This motion demands excessive force from the operator, not only because of the inertia of the load but also because of the inertia of the mobile parts of the crane. Similar excessive forces are experienced by the operator when stopping. What is more, because mobile parts lag behind the payload during the travel, there is always a swing action at the stop position which causes additional effort/time to stabilize. As a result, excessive forces experienced by the operators cause ergonomics issues, and the time taken to stabilize the load causes additional operation time. The Follow-Me principle focuses on compensating the forces that are required to move the inertia of the mobile parts of the crane. The applied principle also enhances the stability of the system. Therefore there are significant improvements in ergonomics and operational efficiency.
System description
Figure 1 shows the Follow-Me principle for a single-axis crane with a hoist. If an operator moves the load, the angle between the hoist chain/cable (𝛼) will be non-zero. By using this angle as an input to a proportional-derivative feedback control loop (PD-controller), the hoist can be actuated to compensate for its inertia. The amount of actuation can be changed by tuning the PD-controller gains.
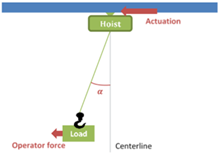
Figure1: Follow-Me principle: the inertia of the hoist is compensated by actuating it using the angle feedback between the chain/cable and centerline of the hoist (α).
The principle can be applied to 1-axis gantry cranes, jib cranes and overhead cranes. Motors are added to assist the motion in desired axes, a sensor is added to measure the cable/chain angle and a control system is added to run the control logic. Figure 2 shows a control architecture implementation for a 2-axis overhead crane where the hoist and trolley (X-axis) are actuated with one motor, and the overhead bridge (Y-axis) is actuated with 2 motors at each side of the bridge.
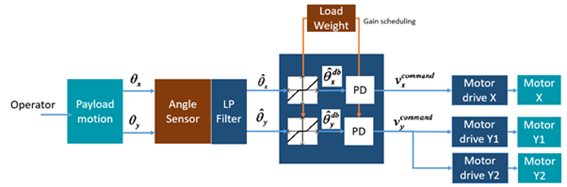
Figure 2: Follow Me control architecture for an overhead crane
A load cell can be added to measure the payload weight and change PD parameters accordingly. This helps to improve the system response with respect to varying payloads which in turn results in a better user experience and operator acceptability.
Difference with existing solutions
The crane systems equipped with Follow-Me combine the comfort of motorized cranes with the agility of manual cranes and It brings additional benefits with respect to ergonomics and operational efficiency.
Who might be interested / Typical use case
Those who suffer from ergonomic issues with manual cranes and/or those who want to have a more stable and faster operation.
Additional resources:
Contact:
- earashi@flandersmake.be