The FM-SLAM system is a visual- or lidar-based SLAM that additionally supports the fusion of Ultra-Wideband, GPS, Aruco, WiFi or generic landmark measurements. This offers a high availability and high accuracy localization solution that requires minimal infrastructural changes. By integrating both relative measurements of the environment from cameras or LiDARs with absolute localization measurements, we increase the robustness, reliability and/or cost of localization. Which of these factors are improved, depends on the choice of sensor combinations.
FM-SLAM is based on the open-source SLAM framework RTAB-Map, which is modified to allow the additional fusion of the absolute localization measurements using graph-based optimization methods. The absolute localization measurements aid in achieving higher accuracy drift-free mapping and more robust loop-closure detection and relocalization. FM-SLAM is a stand-alone C++ library that runs on Linux-x64 platforms, and offers a ROS/ROS2 interface.
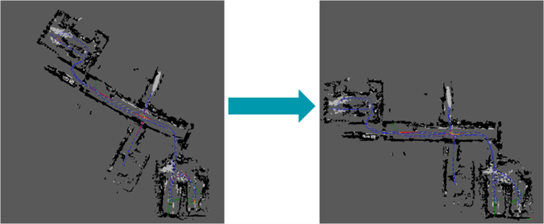
As an example, in the figure below you can see on the left a map created purely camera-based, which contains a lot of drift. By adding only a few Aruco markers with known positions in the 50×30 meter environment, the drift in the map is removed.
The toolbox is of interest to developers/users of autonomous systems (e.g. mobile robots, drones) that want to move to SLAM-based localization for their systems, but cannot rely on a pure SLAM-based localization system.
For more information, please contact: